고정밀 GNSS
고정밀 GNSS 기술은 GPS, GLONASS, Galileo, BeiDou 위성 신호를 활용하며, 듀얼 패치 안테나 기술과 실시간 이동측위 기술인 RTK(Real Time Kinematic)를 접목하여 1 cm에서 수 cm 수준의 위치 정확도를 구현합니다. 구성 요소, 시스템 구성 옵션 및 보정 데이터 입력 방식에 따라 수 초에서 수 분 이내에 수 cm 수준의 정밀한 위치 정보를 제공합니다.
고정밀 GNSS 수신기는 자율주행(V2X), 무인항공기(UAV), 배달 로봇, 무인 농기계 등 다양한 분야에 활용되고 있습니다. 예를 들어, 건설 현장에서 사용되는 타워크레인의 경우 크레인 간 안전거리를 실시간으로 측정하여 충돌을 사전에 방지하는 안전 시스템이 요구되며, 고정밀 GNSS 수신기는 타워크레인에 설치되어 정확한 위치 정보를 지속적으로 모니터링하는 역할을 수행합니다.
당사의 고정밀 GNSS 수신기는 유블럭스(u-blox)사에서 공급하는 ZED-F9P 모듈을 채택하여 설계되었으며, 다양한 고정밀 GNSS 응용 분야에 유연하게 적용될 수 있도록 구성되어 있습니다.

센티미터에서 서브미터까지 고정밀 GNSS 솔루션
고정밀 GNSS 수신기는 다중 주파수(L1, L2, L5) 대역에서 다중 위성을 사용함으로써, 보다 빠르고 정확하게 GNSS 신호를 수신할 수 있습니다. UEF9P03 고정밀 GNSS 수신기의 위성 별 주파수는 L1C/A(GPS/QZSS: 1575.420MHz), L1OF(GLONASS: 1602MHz + k*562.5kHz, k=-7,….,6), E1-B/C(Galileo: 1575.420MHz), B1l(BeiDou: 1561.098MHz), L2C(GPS/QZSS: 1227.600MHz), L2OF(GLONASS: 1246MHz + k*437.5kHz, k=-7,….,6), E5b(Galileo: 1207.140MHz), B2l(BeiDou: 1207.140MHz) 입니다.
UEF9PL15 고정밀 GNSS 수신기는 UEF9P03 고정밀 GNSS 수신기에서 사용하던 L2 대역 대신에 L5 대역을 사용하며 위성 별 주파수는 L5(GPS/QZSS: 1176.450MHz), E5a(Galileo: 1176.450MHz), B2a(BeiDou: 1176.450MHz), SPS-L5(NavIC: 1176.450MHz) 입니다.
고정밀 GNSS 수신기에서 수신하는 위성시스템은 미국의 GPS Global Positioning System , 유럽의 Galileo, 러시아의 GLONASS Global Navigation Satellite System , 중국의 BeiDou BDS: BeiDou Navigation Satellite System , 일본의 QZSS Quasi-Zenith Satellite System , 그리고 인도의 NavIC Navigation with Indian Constellation 이 있습니다.
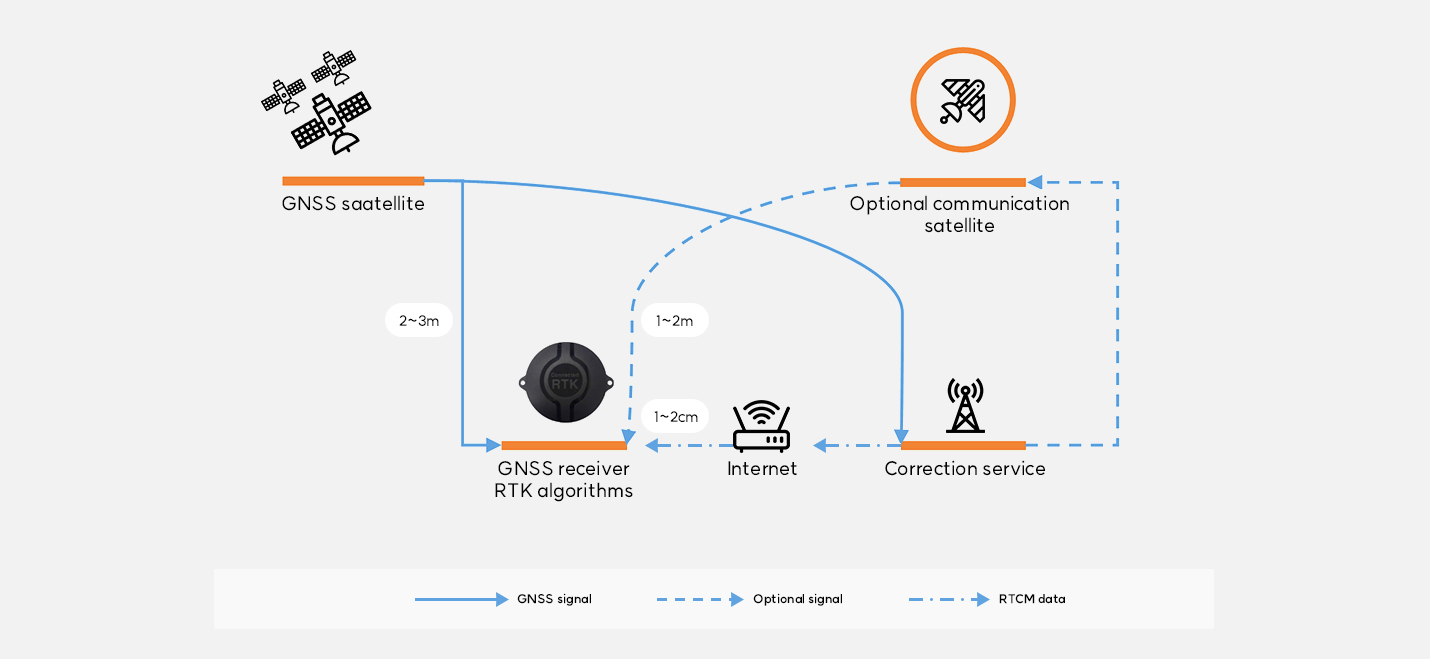
RTK 기술은 기준국(base)과 이동국(rover)의 개념을 도입한 것으로 기준국은 통신 링크를 통해 연속 차동 보정 데이터(RTCM 3.3 프로토콜)를 이동국에 전송합니다. 이를 통해 이동국은 기준국에 대한 상대적인 위치를 높은 정확도로 계산할 수 있게 되며, 기준국과 이동국 사이의 벡터(또는 상대 위치)를 기준선이라고 합니다.
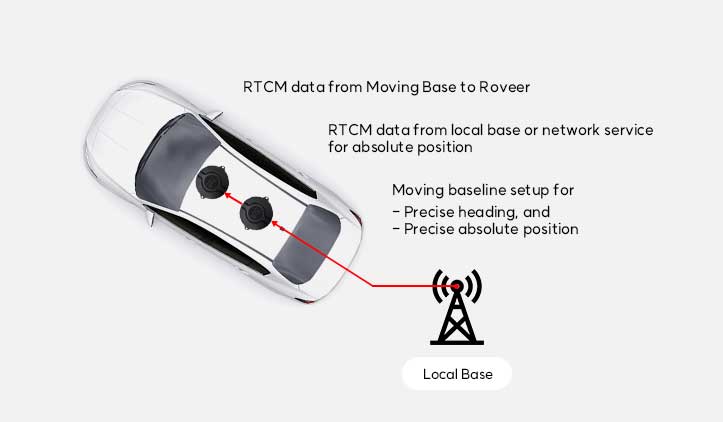
표준 RTK 모드에서는 기준국이 특정 위치에 고정되어 있는 반면, 이동 RTK 모드에서는 기준국과 이동국 수신기가 모두 이동할 수 있습니다. 후자의 경우 두 이동 차량 간의 상대적 위치를 나타내는 오프 셋이 필요한 애플리케이션에 사용되며, 무인항공기(UAV)의 팔로우미 모드에 적용 가능합니다.
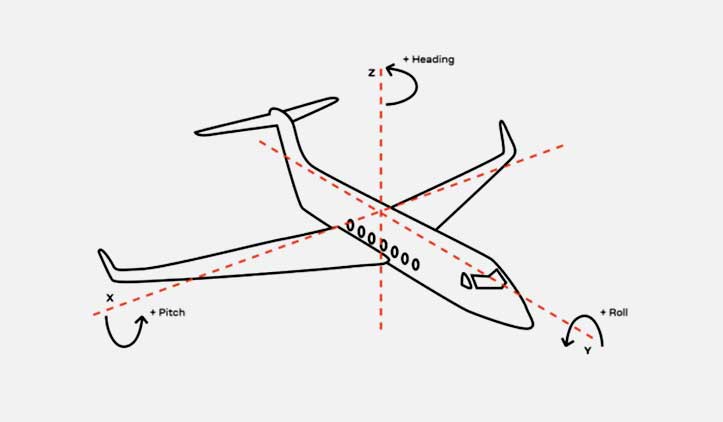
또한 이동 RTK 모드는 동일한 차량 플랫폼에 두 개 또는 세 개의 GNSS 수신기를 탑재하여 각각의 상대적 위치를 고정함으로써 차량의 방향을 유도할 수 있습니다. X축에 두 개의 안테나를 장착하면 선수 방향(heading)과 X축 회전(roll) 정보를 파악할 수 있고, 세 개의 안테나를 장착하면 선수 방향, X축 회전, Y축 회전(pitch) 정보를 얻을 수 있으며 이를 통해 차량의 위치를 정확히 파악할 수 있습니다.
이동국의 절대위치정보가 고정밀로 필요한 경우 기준국에 보정 데이터를 제공할 수 있으며, 기준국이 RTK 고정 모드로 전환되어 결과적으로 절대 위치 정확도가 향상됩니다. 보정 신호가 없을 경우 표준 3D 고정 위치 정확도를 갖습니다.
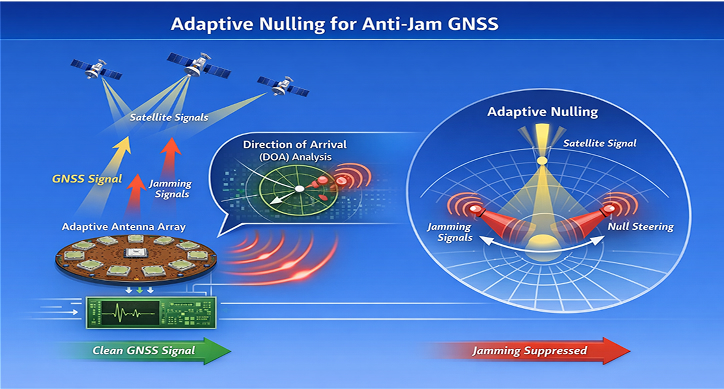
항재밍 GNSS
Adaptive Nulling은 GNSS 수신기를 의도적 재밍 및 비의도적 전파 간섭으로부터 보호하기 위한 공간 영역 기반 항재밍 기술입니다. 다중 안테나 배열의 수신 패턴을 실시간으로 제어하여 간섭 신호는 효과적으로 억제하고, 위성 신호는 안정적으로 유지함으로써 전파 환경이 열악한 조건에서도 신뢰성 있는 위치·항법·시각(PNT) 정보를 제공합니다.
Adaptive Nulling은 다중 안테나 소자에서 수신된 신호를 실시간으로 분석하여 간섭 신호의 입사 방향(DOA, Direction of Arrival)을 추정합니다. 이후 각 안테나 채널에 복소 가중치(Complex Weight)를 적용하여 간섭 신호가 유입되는 방향에는 공간적 영점(Null)을 형성하고, 위성 신호 방향의 수신 이득은 유지합니다.
이 과정은 연속적으로 수행되며, 재밍 환경의 변화에도 실시간으로 적응합니다. Adaptive Nulling 기술은 다음과 같은 다양한 간섭 신호를 효과적으로 억제합니다.
- 연속파(CW) 재밍
- 광대역 노이즈 및 협대역 간섭
- 주파수 스윕(Chirp) 재밍
- 펄스형 간섭 신호
- AM / FM / PM 변조 신호
- 고조파 및 비의도적 전파 간섭
Adaptive Nulling은 기존의 주파수 및 시간 영역 필터링 방식으로는 대응이 어려운 간섭을 공간 영역에서 효과적으로 제거합니다. CRPA 구조와 결합될 경우, 항재밍 성능을 크게 향상시키며, 확장성과 신뢰성이 검증된 GNSS 보호 기술을 제공합니다.
- 군용 차량 및 장갑 플랫폼
- UAV 및 무인 시스템
- 함정 및 해상 플랫폼
- 유도무기 및 미사일 시스템
- 고신뢰 항법·시각 인프라
적용 분야
RF 안테나
안테나는 신호 송수신을 담당하는 요소로 무선 통신 시스템의 필수 구성 요소입니다. 400MHz~6GHz 주파수 범위의 모든 유형의 패시브 안테나 기술을 보유하고 있으며, OTA 및 패시브 안테나 테스트를 위한 무선 무반향 챔버를 갖추고 있습니다.
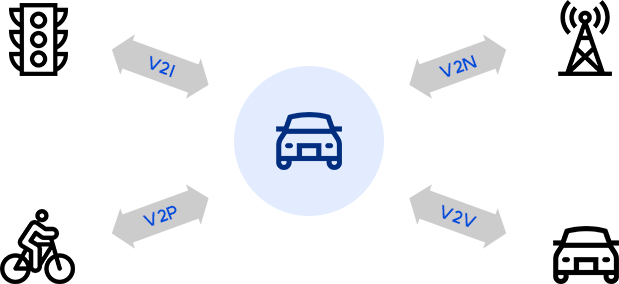
네트워크 커넥티비티는 자동차, 모빌리티, 운송 산업에서 가장 중요한 트렌드로 빠르게 발전하고 있습니다. 오늘날 많은 자동차는 무선 통신을 통해 웹에서 정보를 수집할 수 있으며 차량과 차량(V2V), 차 량과 인프라(V2I), 차량과 보행자(V2P), 차량과 네트워크(V2N)가 연결되는 기술을 요구하고 있습니다.
V2X는 Vehicle to Everything의 약자로, 차량 주변의 모든 사물과 통신할 수 있는 기술을 의미하며 GNSS 기술, LTE 기술, 5G 기술 등 모든 통신 기술을 필요로 합니다. V2X의 적절한 처리를 위해서는 모든 사물의 정확한 위치 정보와 시간 정보가 필요하며, 이를 통해 사물의 다음 위치를 예측할 수 있습니다. 자율주행 분야에서는 카메라, 라이다(LiDAR), 레이더, GNSS 그리고 V2X 기술이 요구되며, 그 중 GNSS와 V2X는 무선 환경에서 작동하며 다양한 주파수 대역에서 다른 형태의 RF 안테나를 필요로 합니다.
- 4G 대역: 824~894MHz, 1710~1880MHz, 1920~2170MHz, 2500~2690MHz
- 5G 대역: 3400~3700MHz, 5850~5925MHz
- GNSS 대역: 1559~1610MHz(L1), 1197~1254MHz(L2), 1164~1188MHz(L5)
GNSS 안테나를 통해 위치와 시간 정보를 수집하고, 수집된 정보를 이용하여 사물의 위치, 진행 방향 및 속도를 계산할 수 있습니다. 4G 및 5G 통신 기술을 이용하여 서로의 정보를 교환하며, 원활한 교통 흐름을 구현할 수 있습니다.